![]()
Japanese/English
![]()
Japanese/English
FESS開発プロジェクトメンバーのご紹介です。
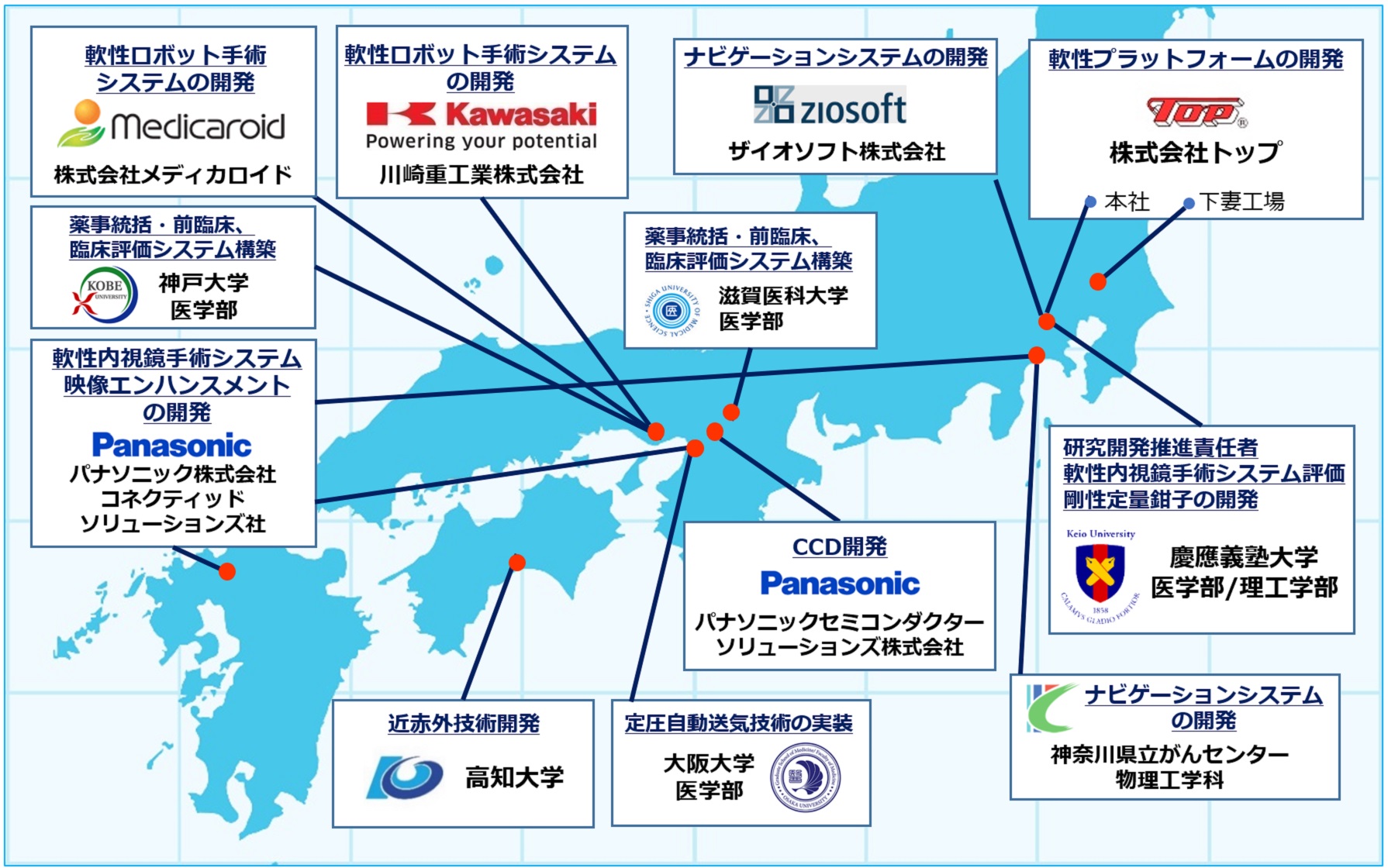
『産学連携』。日本の先進医療とロボット技術をともに集約・連携、そして世界へ。
異なる研究開発主体/手法を融合してシームレスに具現化していきます。
 組織概要
組織概要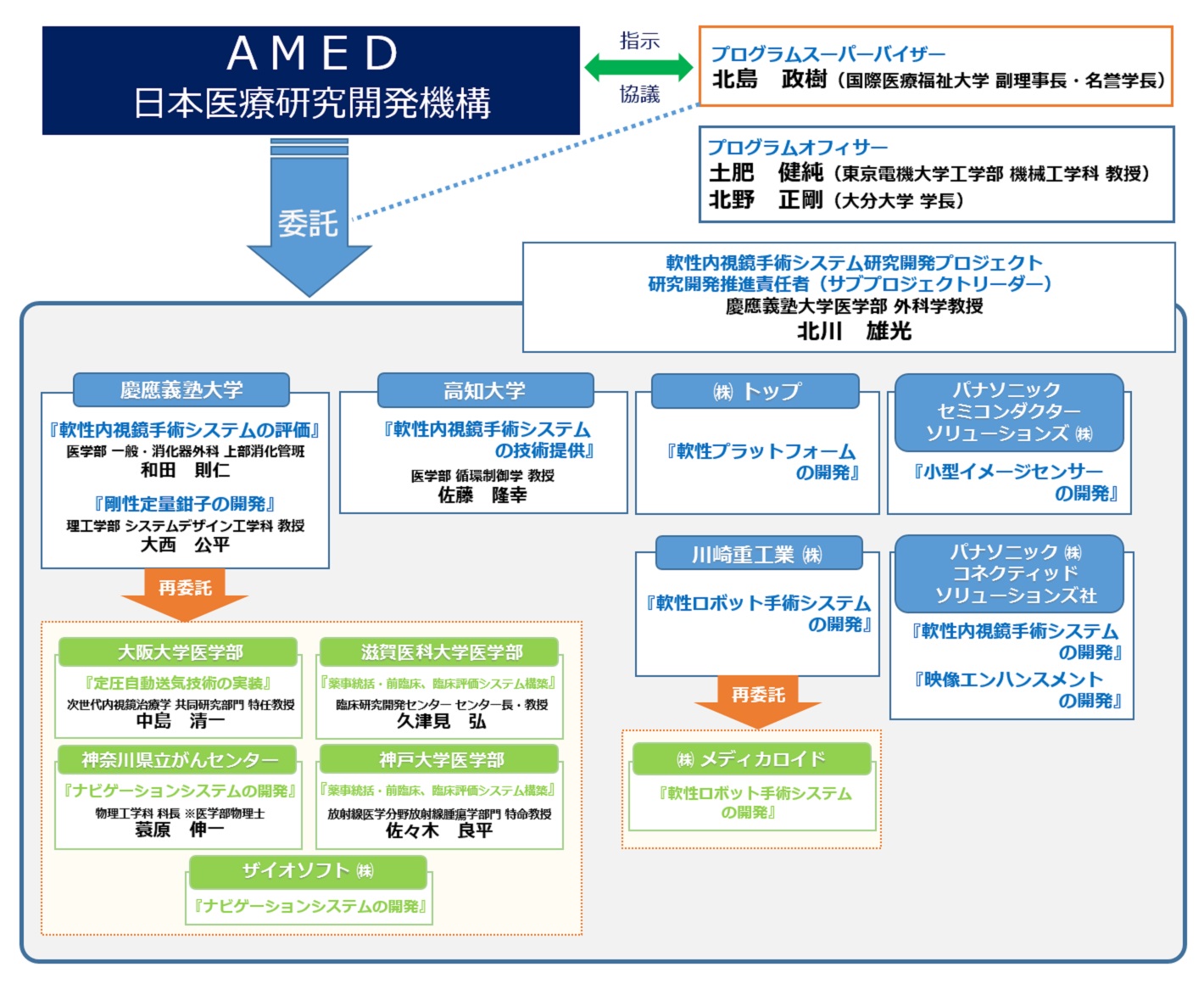
プロジェクトメンバー一覧 研究開発推進責任者
研究開発推進責任者北川 雄光(慶應義塾大学医学部 外科学教授)
慶應義塾大学 医学部/理工学部『軟性内視鏡手術システム評価』
和田 則仁(医学部 一般・消化器外科 上部消化管班 専任講師)
●紹介ページ●
『剛性定量鉗子の開発』
大西 公平(理工学部 システムデザイン工学科 教授)
●紹介ページ●
◎コラボレーションメンバー(再委託先)
『ナビゲーションシステムの開発』
蓑原 伸一(神奈川県立がんセンター 物理工学科 科長 ※医学部物理士)
●紹介ページ●
『定圧自動送気技術の実装』
中島 清一(大阪大学 次世代内視鏡治療学 共同研究部門 特任教授)
●紹介ページ●
『薬事統括・前臨床、臨床評価システム構築』
久津見 弘(滋賀医科大学 臨床研究開発センター センター長・教授)
●紹介ページ●
佐々木 良平(神戸大学 放射線医学分野放射線腫瘍学部門 特命教授)
●紹介ページ●
『ナビゲーションシステムの開発』
ザイオソフト株式会社
●会社ホームページ●
高知大学 医学部『軟性内視鏡手術システムの技術提供』
佐藤 隆幸(高知大学医学部 循環制御学 教授)
●紹介ページ●
川崎重工業株式会社『軟性ロボット手術システムの開発』
◎コラボレーションメンバー(再委託先)
『軟性ロボット手術システムの開発』
株式会社メディカロイド
●会社ホームページ●
株式会社トップ『軟性プラットフォームの開発』
パナソニック株式会社 コネクティッドソリューションズ社『軟性内視鏡手術システムの開発』
『映像エンハンスメント開発』
パナソニック セミコンダクター ソリューションズ株式会社『小型イメージセンサ-の開発』

日本医療研究開発機構 未来医療を実現する医療機器・システム研究開発事業
高い安全性と更なる低侵襲化及び高難度治療を可能にする軟性内視鏡手術システムの開発
[AMED Research and Development Project] Flexible Endoscopic Surgical System;FESS®
copyright © 2016-2019 FESS. all rights reserved.