![]()
Japanese/English
![]()
Japanese/English
 Project Overview
Project OverviewThe project FESS is one of the three sub-projects under AMED's “Research and Development of Advanced Medical Devices and Systems to Achieve the Future of Medicine.”
The three sub-projects are:
1.Development of Flexible Endoscopic Surgical System (FESS) Enabling Safer, More Minimally Invasive and High-Complexity Interventions
2.Development of Innovative and Systematic Rehabilitation Systems to Induce Reorganization of Neural Circuits in Patients
3.Development of a Smart Treatment Chamber for the Improvement of Both Medical Safety and Efficiency
※ What is AMED?
AMED stands for The Japan Agency for Medical Research and Development.
AMED was established in April 2015 in order to centralize government funding for medical R&D and to promote integrated research and development from basic research to practical application.
Flexible Endoscopic Surgical System (FESS)The development of a novel surgical device, Robot-assisted Rigid Endoscopic Surgical System has widened the use of minimally invasive procedures, enhancing precision by giving surgeons'hands higher dexterity. However, there are still many surgeries mostly performed by an open surgical approach, such as those for pancreatic cancer, because of the limited access of rigid endoscopic hands. On the other hand, flexible endoscopic systems developed in the past fell short of practical use due to design limitations deriving from gastroenterology endoscopic devices that require extremely high skills to manipulate the forceps.
Addressing these issues, by applying and fusing Japan's strong cutting-edge technologies and expertise in robotics and flexible endoscopes, we aim to realize an innovative flexible endoscopic surgical system that surgeons can intuitively manipulate with a clear panoramic vision during a surgery.
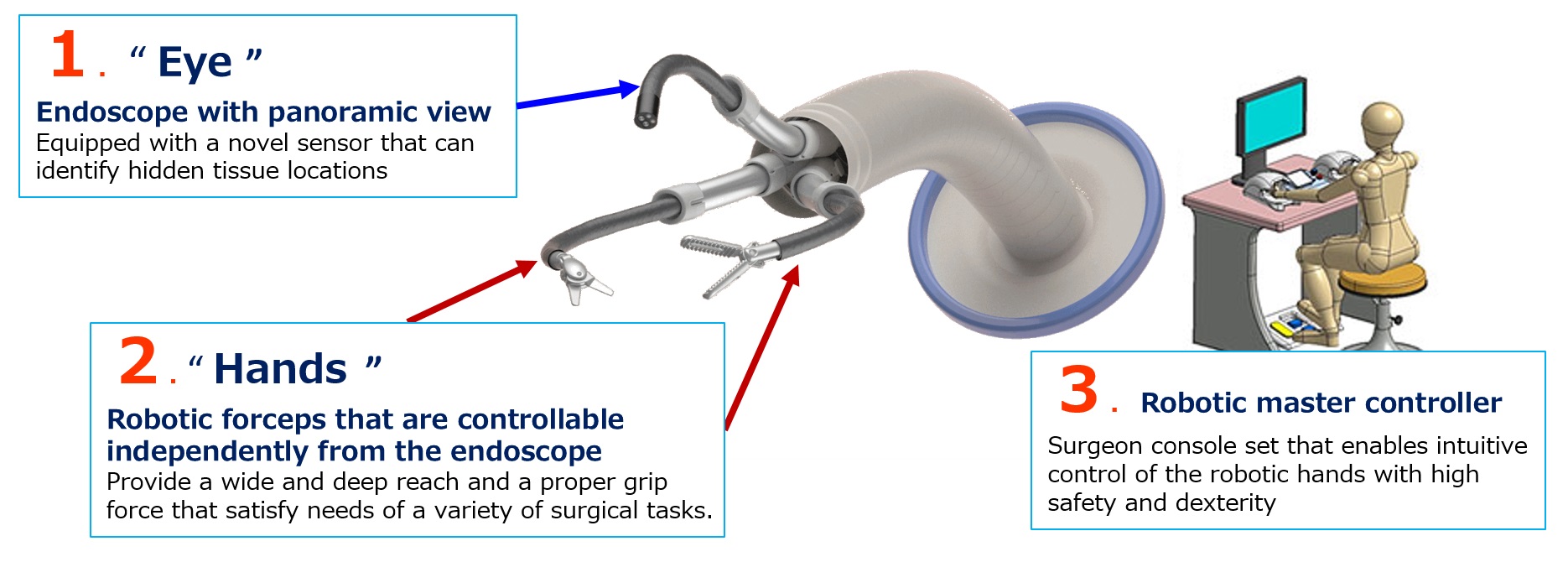
● The development targets the following three features:
| 〔1〕 | Flexible surgical endoscope that provides a wide and high precision view, and is equipped with an advanced sensing technology enabling a real-time guidance to locate critical organs during the surgery. |
| 〔2〕 | Compact flexible robotic forceps that are controllable separately from the endoscope, have a wide and deep reach and a proper grip force, and satisfy needs of a variety of surgical tasks. |
| 〔3〕 | Surgeon console set that enables intuitive control of the robotic hands |

[AMED Research and Development Project]
Flexible Endoscopic Surgical System;FESS
copyright © 2016-2019 FESS. all rights reserved.